- 2021年05月18日 星期二
传感器冗余确保智能汽车不遗漏任何数据;针对特殊场景建立独特模型,有利汽车开启对应“安全模式”







| ||
|
最近,北京、上海、广州、武汉、长沙和无锡6个城市被确定为智慧城市基础设施与智能网联汽车协同发展的第一批试点城市。
同时,北京还设立了国内首个智能网联汽车政策先行区。在政策先行区内,相关企业可以开展试运行及商业运营服务,在商业运营过程中可提供收费服务。
自动驾驶行业不断迎来政策利好消息。不过,与此同时,近期因为一些事件的出现,自动驾驶汽车的安全性也成为社会讨论的焦点。
硬件和软件算法是影响自动驾驶汽车安全性的关键因素。比如,激光雷达、摄像头等传感器受到环境干扰,会产生盲区,导致环境感知出现差错;算法对多运动目标意图的识别判断不准确,则会导致错误决策。
那么,目前国内的自动驾驶厂商是怎样应对,提升自动驾驶汽车的安全性?
冗余性硬件配置提高自动驾驶安全性
北京航空航天大学交通科学与工程学院教师任秉韬博士指出,单一硬件的确存在技术局限性,可以通过设计冗余性的硬件配置方式来解决。比如,自动驾驶汽车可以设计冗余传感系统,不依赖于单一的传感系统。
冗余,最早是飞机常用的技术术语,指的是飞机电子控制系统均进行了安全备份,防止一套系统突然坏掉,影响飞机的正常运行。同理,高级别自动驾驶的实现也需要冗余设计,以保证一套自动驾驶系统出问题时,另一套系统也可以及时发挥作用。
冗余结构的设计虽然带来了更好的安全性,但也额外增加了倍数成本,因此自动驾驶的冗余性设计一直较为困难。不久前,滴滴自动驾驶却在冗余性的硬件配置方面有所突破。
今年4月,滴滴自动驾驶升级推出了新一代自动驾驶硬件平台——滴滴双子星。该平台搭载了50多个传感器,算力超过700TOPS(处理器运算能力单位),每秒超千万级点云成像,而且整体造价较上一代保持不变。
滴滴自动驾驶首席运营官孟醒介绍,其实滴滴自动驾驶推出“双子星”硬件平台是个很复杂的过程。首先,滴滴要把转向、刹车等各个层面的冗余方案都设计出来,然后在自动驾驶车辆上进行调试。这些都是非常困难的。
不过,滴滴自动驾驶依靠自身积累的丰富真实使用场景数据,成功开发出新一代更符合无人驾驶运营需求的硬件平台。
该平台设计了多重冗余,不仅有核心高性能传感器冗余,而且还拥有车载自动驾驶系统冗余、远程协助系统冗余、前装量产车型冗余等,整体上实现了硬件的多层冗余性配置。
比如,传感器冗余保证了自动驾驶汽车在各个方向、各类型的毫米波雷达、摄像头、激光雷达等感知设备都能交叉验证,进一步提升了车辆在隧道、雨雾、逆光、黑夜等复杂场景中的感知能力。如果自动驾驶汽车中有一个传感器坏了,或者因为各种其他原因,导致传感器带来的数据无效,那么还会有其他传感器能够覆盖同一场景,交叉验证能让自动驾驶达到更高的安全等级。
特殊场景模型、算法优化让自动驾驶更加“智能”
俗话说,软件是自动驾驶的“大脑”,也是确保自动驾驶安全的关键因素,而算法、模型则又是自动驾驶这个“大脑”的核心。
吉林大学汽车工程学院何睿副教授指出,自动驾驶分为感知、决策、控制到执行几个体系。从目前出现的自动驾驶交通事故案例来看,影响自动驾驶汽车安全性的最关键因素仍是在感知层。算法的智能化水平不够,会导致某些突发场景中,软件层面产生错误的决策。
因此,自动驾驶厂商非常重视对算法、模型的持续研发和改进。Waymo(谷歌母公司旗下自动驾驶公司)开发了利用强化学习和进化算法设计神经网络体系结构的新方法,并应用于自动驾驶的语音识别和图像识别。
同样,我国自动驾驶厂商也在积极探索。滴滴自动驾驶就针对道路遇到的特殊场景,进行了很多针对性的模型优化工作。
比如,在存在强光直射等特殊环境下,人类驾驶员通常需要戴上眼镜或打开遮阳板。对于自动驾驶车辆来说,日光直射到摄像头或者传感器,会造成大的光斑,对自动驾驶的感知系统造成影响。
孟醒表示,滴滴自动驾驶的工程师们在多传感器融合方案的基础上,做了很多动态数据增强的工作。比如,针对不同的光照场景,设计了不同的模型,确保在不同亮度下系统的感知效果。这让滴滴自动驾驶汽车即便是在严重逆光的情况下,也能够准确识别,并避让行人、汽车和其他物体。
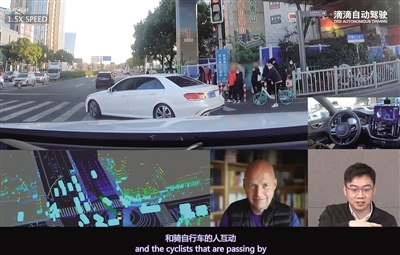
在滴滴自动驾驶近期发布的全球首支自动驾驶连续5小时无接管视频中,一辆白色的自动驾驶测试车行驶于上海嘉定区,经历了白天、黄昏以及夜晚等多个时段,途经人流密集的嘉亭荟商业区、工厂区、办公区和住宅区等不同区域。
当遇到通勤晚高峰,十字路口涌现大量行人、单车和大型班车时,通过视频可以看到,滴滴自动驾驶测试车会自动减速,而且如果前方有行人,也能够灵活避让,而不是小心翼翼地跟在后面。
当行驶到繁忙的商业区时,测试车会通过判断,选择流量较少的街道;当行驶到幼儿园或者学校附近时,测试车则会以更慢的速度行驶,以保障学生的安全。
孟醒介绍,滴滴自动驾驶测试车之所以能够在上述特殊场景下做出正确决策,是因为它针对特殊场景建立了独特的模型。比如,在夜间行驶时,自动驾驶汽车有夜间模型;在下班高峰期时,汽车则开启了谨慎驾驶模型;在学校附近,汽车又会开启“安全模式”,以更谨慎的方式进行驾驶。
借助共享出行网络,积累丰富的场景数据
除算法、模型外,数据积累对自动驾驶的软件系统也非常重要。北京交通大学先进控制系统研究所副所长李润梅教授表示,为什么消费者会觉得燃油车相较于自动驾驶汽车安全性更高,这其实是因为燃油车拥有大量的数据、丰富的经验做支撑,才能尽量避免一些问题的发生。而自动驾驶目前由于还缺乏充分、足够的系统测试,缺乏数据积累,如果遇到特殊场景,与某些软件层面的算法发生冲突,就导致自动驾驶系统做出错误决策。
可以说,数据积累是自动驾驶在软件层面的重要支撑。目前,由于自动驾驶测试场地不足,或者真实复杂的交通场景难以完全在仿真实验室中实现复制,导致自动驾驶测试并不充分,数据积累也不足。
因此,增加在现实环境中的测试,是进一步提升自动驾驶汽车安全性的重要环节。
截至2020年底,北京市已经累计给14家自动驾驶企业的87辆车发放了一般性道路测试牌照,累计路测超过221万公里。上海已经累计向21家企业148辆车颁发自动驾驶的道路测试和示范应用资质,企业数量和牌照数量均居全国首位。
据了解,滴滴自动驾驶成为首家获得上海三个测试区牌照的企业。同时,在最近北京出台的智能网联汽车政策先行区中,滴滴自动驾驶不仅成为该政策先行区首批获得测试牌照的企业,而且还获得了夜间及复杂天气场景的测试资格,可进行24小时全天候道路测试,尤其是在雨雾等特殊天气环境下。
孟醒认为,实际道路测试和网约车的场景数据,为滴滴自动驾驶积累了大量“学习资料”。当测试车遇到一些特殊场景时,汽车会把这些特殊场景记录下来,并在仿真实验室进行反复模拟,进而把实际案例转化成它的测试场景,纳入到它的场景库中。
同时,测试车还会对这些场景做“变量扩展和扫描”,进一步丰富场景库。比如,测试车采集到这样一个场景,在其前方有辆摩托车或者其他障碍车,并且车辆正在挤测试车或者并线。针对这一场景,滴滴自动驾驶首先会对这些变量进行扫描、扩展,比如变换测试车或者障碍车位置,再调整一下车速,比如快10%或者慢10%。通过对这些变量的扩展,能够将一个场景变成一系列的新场景,从而使滴滴自动驾驶的场景库更加庞大。
除了通过自动驾驶测试车采集场景的方式外,在数据方面,滴滴自动驾驶还拥有其独特优势,也就是滴滴网约车上的真实场景数据。
据了解,目前桔视覆盖网约车50%订单,基于海量出行数据和安装在交通工具上的桔视设备,滴滴全年可采集1000亿公里的真实场景数据。这些数据也能让场景库进一步丰富。
如今,自动驾驶已然成为汽车产业发展变革的主要方向之一。但“安全”仍然是自动驾驶技术发展的初心,更是自动驾驶汽车商用的红线。
孟醒强调,除了在硬件和软件层面持续改进,提高安全性外,滴滴自动驾驶还设立了国内首个自动驾驶安全护航中心,给予自动驾驶车远程协助和控制;同时,公司也搭建了车路协同体系,在某些盲区可以借助道路的感知系统,将相关信息发送给自动驾驶车。
此外,借助海量数据滴滴自动驾驶也建立了一套道路场景风险评估体系,能够帮助汽车选择更合适的自动驾驶道路。这些举措都是为了给自动驾驶用户提供更多的安全保障。
自动驾驶的安全是未来很长一段时间内,各汽车厂商需要不断去攻克的难题。孟醒表示,提升道路安全是滴滴研发自动驾驶的初衷,未来会继续与自动驾驶产业各个层面展开紧密合作,共同攻克技术难题。
新京报记者 王春蕊
更多详细新闻请浏览新京报网 www.bjnews.com.cn