- 2021年07月05日 星期一







| ||
| ||
| ||
| ||
| ||
| ||
|
7月4日,经过约7小时的出舱活动,神舟十二号航天员乘组圆满完成出舱活动期间全部既定任务,我国空间站阶段航天员首次出舱活动取得圆满成功。
此次出舱活动首次检验了航天员与机械臂协同工作的能力,雄伟有力的空间站核心舱机械臂格外引人注目。
据介绍,核心舱机械臂是目前同类航天产品中复杂度最高、规模最大、控制精度最高的空间智能机械系统。航天科技集团五院在抓总研制机械臂过程中,在关键技术、原材料选用、制造工艺、适应空间站环境的长寿命设计等方面均取得创新突破,全部核心部件实现国产化。
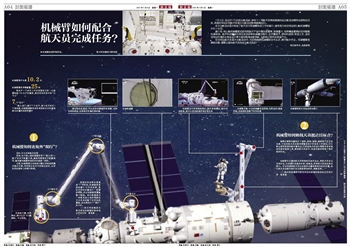
在空间站航天员首次出舱活动中,刘伯明搭乘机械臂前往作业点,展开舱外作业。机械臂都有哪些功能,是怎么配合航天员完成出舱任务的?
综合新华社、央视新闻
机械臂展开长度10.2米
机械臂最多承载重量25吨
相当于一个成年人可以凭借自己的一只胳膊抬起100公斤的重物,是空间站任务中的“大力士”
7个“关节”
“肩3+肘1+腕3”7个关节,每个关节对应1个自由度,机械臂能够实现自身前后左右任意角度与位置的抓取和操作
1 机械臂如何在舱外“爬行”?
目的:扩大任务触及范围
原理:由于核心舱机械臂采用了“肩3+肘1+腕3”的关节配置方案,肩部和腕部关节配置相同,意味着机械臂两端活动功能是一样的。
过程:机械臂通过末端执行器与目标适配器对接与分离,同时配合各关节的联合运动,从而实现在舱体上的爬行转移。
我国空间站将来要建成“T”字构型,机械臂是要面向整个15年的运营,要去不同的位置进行一些辅助作业,所以机械臂要覆盖整个舱段。我们就想通过一种既灵活又经济简便的方式来实现整个空间站的覆盖,所以就设计了“爬行”的方式。
——航天科技集团五院空间站机械臂控制系统主任设计师 梁常春
2
机械臂如何助航天员抵达目标点?
便携式脚限位器设计了旋转、俯仰、滚转、偏航四个关节自由度,可协助航天员在舱外调整至执行任务的工作姿态;与之配合使用紧密的舱外操作台,可协助航天员进行维修任务时挂放设备和维修工具,解放航天员双手,实现设备或维修工具的临时存放。
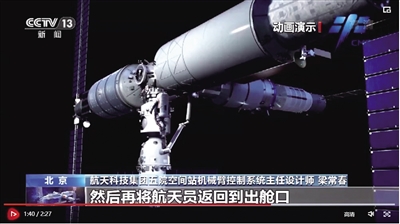
机械臂可以辅助航天员转移到目标作业点,等航天员自主完成作业,比如舱外设备的安装、维修后,再将航天员送返到出舱口。可以快速将航天员从出舱的位置转移到作业的位置,这比航天员在舱外爬行自主转移要快很多,提高效率。
——航天科技集团五院空间站机械臂控制系统主任设计师 梁常春
A04-A05版图片(除署名外)/均为视频截图 新京报制图/许骁
更多详细新闻请浏览新京报网 www.bjnews.com.cn